Master's Thesis : Development and Control of Modular Robots for Rough Terrain Traversal
Optimal Torque Control for a Compliant Modular Robot:

- The prime motivation behind wheel torque control Is slip reduction while climbing step-like obstacles.
- It is achieved by fusing optimal torque controller with a velocity controller.
- The desired torque values are obtained from an optimization problem that is formulated with an objective to minimize traction-to-normal force ratios for all the wheels.
- The numerical and experimental results validate the efficacy of this method. There is a considerable reduction in wheel-slip when this controller is used.
- The robot was made to climb steps from a tiled, carpeted, taped and wet floors during the experimental studies.
A Novel Compliant Modular Robot for Traversing on Uneven Terrains:

- A 3-module passive robot is developed with compliant joints to avoid tip-over.
- An optimization problem is formulated based on the quasi-static analysis of the robot to estimate the stiffness values for the compliant joints.
- Passive robots are generally more durable.
- The robot was able successfully climb a step of height 17 cm.
- It shows very good terrain traversal capabilities.
- The 5-module variant of this robot successfully climbed a step of height 36 cm.
- The use of springs also helps in some slip reduction due to the effective redistribution of normal forces. It also helps improve climbing efficiency.
A Semi-active Modular Robot for Climbing Big Step-like Obstacles :
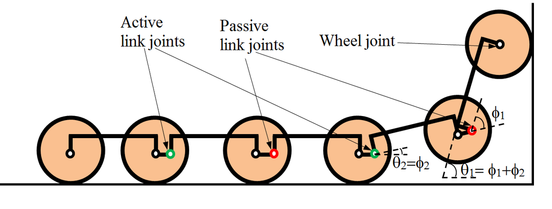
- In this robot alternate link joints are actuated. The aim is to use wheel traction for climbing.
- Link actuation is used sparingly to avoid tip-over. Link actuators are activated only when the module reaches a certain threshold angle that is indicative of tip-over.
- A model based control scheme is developed to achieve the desired control action at the link joints.
- The 5-module semi-active robot can climb steps of heights up to 2 times its module length.
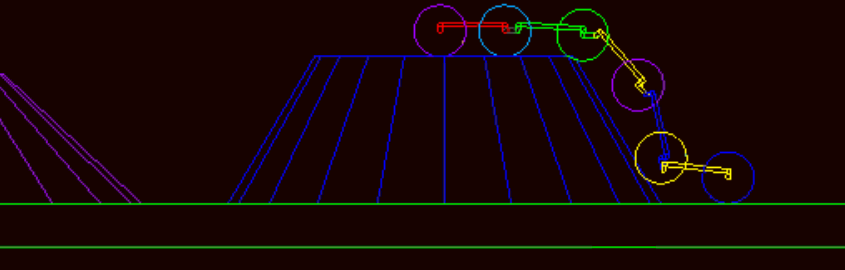
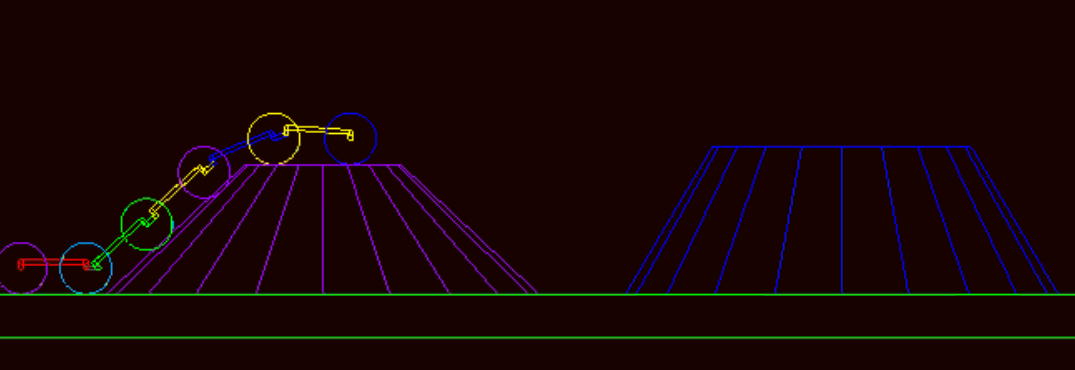
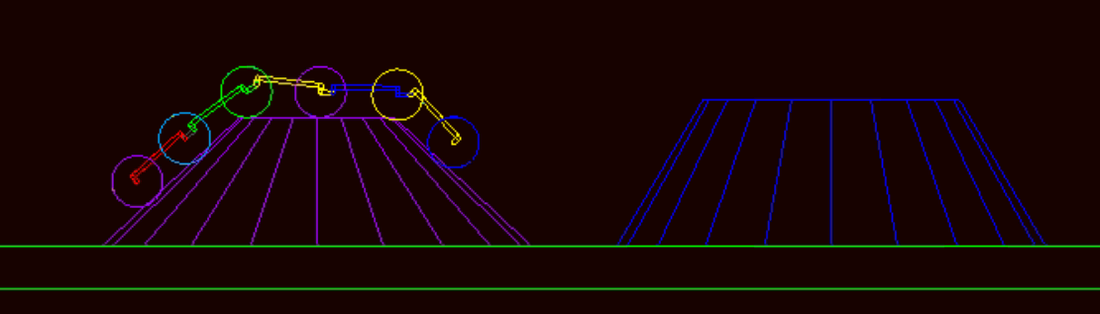
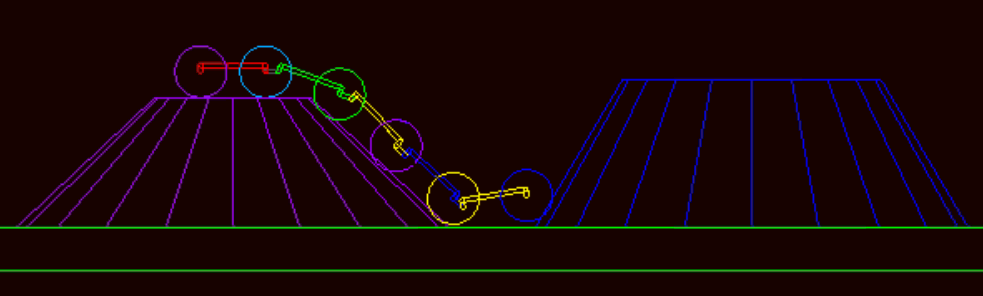
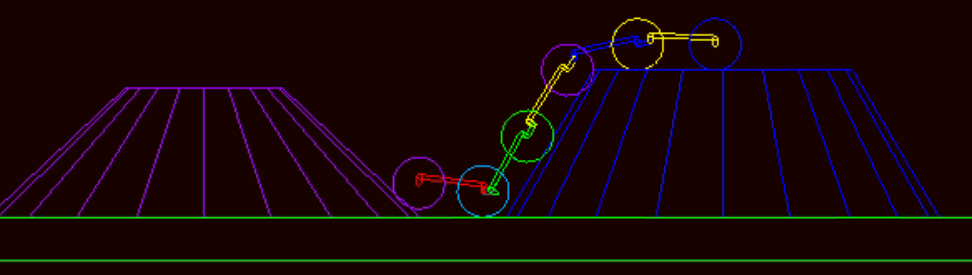
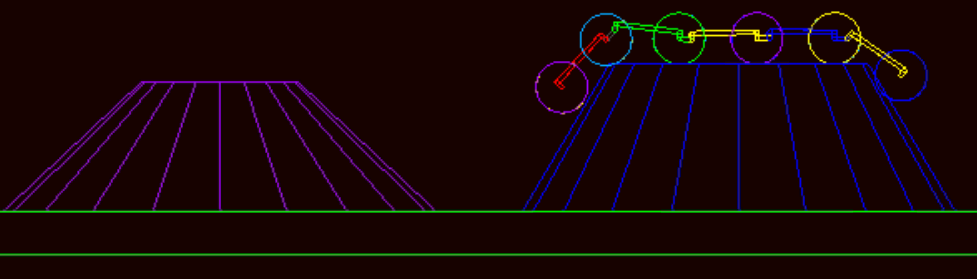
Snapshots of the semi-active robot traversing on an Uneven terrain.
